The ELISA Project is hosting its next workshop on December 10-12 at the NASA Goddard Space Flight Center in Greenbelt, Maryland. This event, which is free to attend and open to any interested participants, will provide more details about the formation of a new Space Grade Linux Special Interest Group (SIG).
The Space Grade Linux SIG will address the challenges of space, which often includes a long lifespan for robotic or human-based missions. From development to deployment there are multiple considerations that need to be considered. This new SIG is the initial step towards creating an ecosystem of supported platforms and a collaborative community. Hosted under the ELISA Project, the Space Grade Linux SIG is currently seeking feedback about Linux in Space in a survey and recruiting more members. Click here to provide your feedback.
With NASA’s leadership in this area, the three-day workshop is designed to facilitate an exchange of ideas and hands-on collaboration that will drive the future of Linux systems in space-grade applications. Speakers inlcude representatives from ELISA Project member companies including Boeing, Red Hat and Bosch as well as NASA, CesiumAstro, TelePIX,the Linux Foundation and more. Attendees will engage in a series of panel discussions, and presentations focused on the unique challenges and opportunities of deploying Linux in space environments, including considerations for safety, reliability, and sustainability.
Workshop Topics and Speakers include:
The ELISA Systems Working Group – is it ready for space? – Philipp Ahmann, ETAS
Lessons from Automotive Grade Linux – Walt Miner, The Linux Foundation
Linking external test results to test cases in BASIL to support preexisting test infrastructure – Luigi Pellecchia, Red Hat
How to use ks-nav for a feasible and meaningful test campaign in the kernel – Alessandro Carminati, Red Hat
Space Grade Linux interest survey results – Ramon Roche, Dronecode Foundation, and Kate Stewart, The Linux Foundation
Verification and validation of the OS and “certification package” – Scott Tashakkor, NASA
Test and assurance of non-volatile memory devices for space – Ted Wilcox, NASA
Addressing security topics for future space systems using Linux – Joshua Krage, NASA
Linux Kernel design documentation – Gab Paoloni, Red Hat; Kate Stewart, The Linux Foundation; and Chuck Wolber, Boeing
Space ROS – Matt Hansen, Space ROS maintainer
cFS overview – Richard Landau, NASA; and Ashok Prajapati, NASA
Deploying NASA cFS with Yocto – Mark Senofsky, CesiumAstro
Investigating implementation of Linux-based payload computers: a review of in-orbit demonstrations for Edge AI in space missions – Dongshik Won, TelePIX Co., Ltd.
Container and immutable patterns for operating systems and wordloads – Michael Epley, Red Hat
Containerization in space: Podman for mission-critical operations and resilience – Douglas Schilling and Dan Wash, Red Hat
Real Time Linux update – Steve Rostedt, Google
Linux in automotive on safety applications – Naresh Ravuri, Magma Electronics
You can find the complete schedule here. Register for the workshop here.
This event represents a significant step toward making Linux a trusted, robust platform for safety-critical applications. As part of the ELISA Project’s mission, this workshop aims to foster the development of open source solutions that meet the rigorous demands of aerospace, driving innovation that will ultimately benefit a variety of safety-critical fields.
If interested participants are unable to join the workshop, ELISA Project encourages participation through joining the mail list or formation calls. Learn morehere.
Written by Kate Stewart, Vice President of Dependable Embedded Systems at the Linux Foundation, and Philipp Ahmann, Senior OSS Community Manager at ETAS and Chair of the ELISA Project Technical Steering Committee
Overview
In Lund, Sweden, Volvo recently hosted the ELISA workshop, aligning with their strong commitment to improving safety. The event was a perfect match for the ELISA community, attracting a full capacity of 30 in-person attendees and engaging over 15 virtual participants. The workshop not only provided valuable discussions and brainstorming sessions but also offered attendees a taste of Swedish hospitality with delightful breaks and lunches – facilitating a lively “hallway track”. The lively conversations sometimes made it challenging to stick to the schedule, but the energetic atmosphere fostered productive exchanges of ideas.
Insightful sessions extract
Presentation: Constant Flow of Increasing Challenges for a Safety Manager
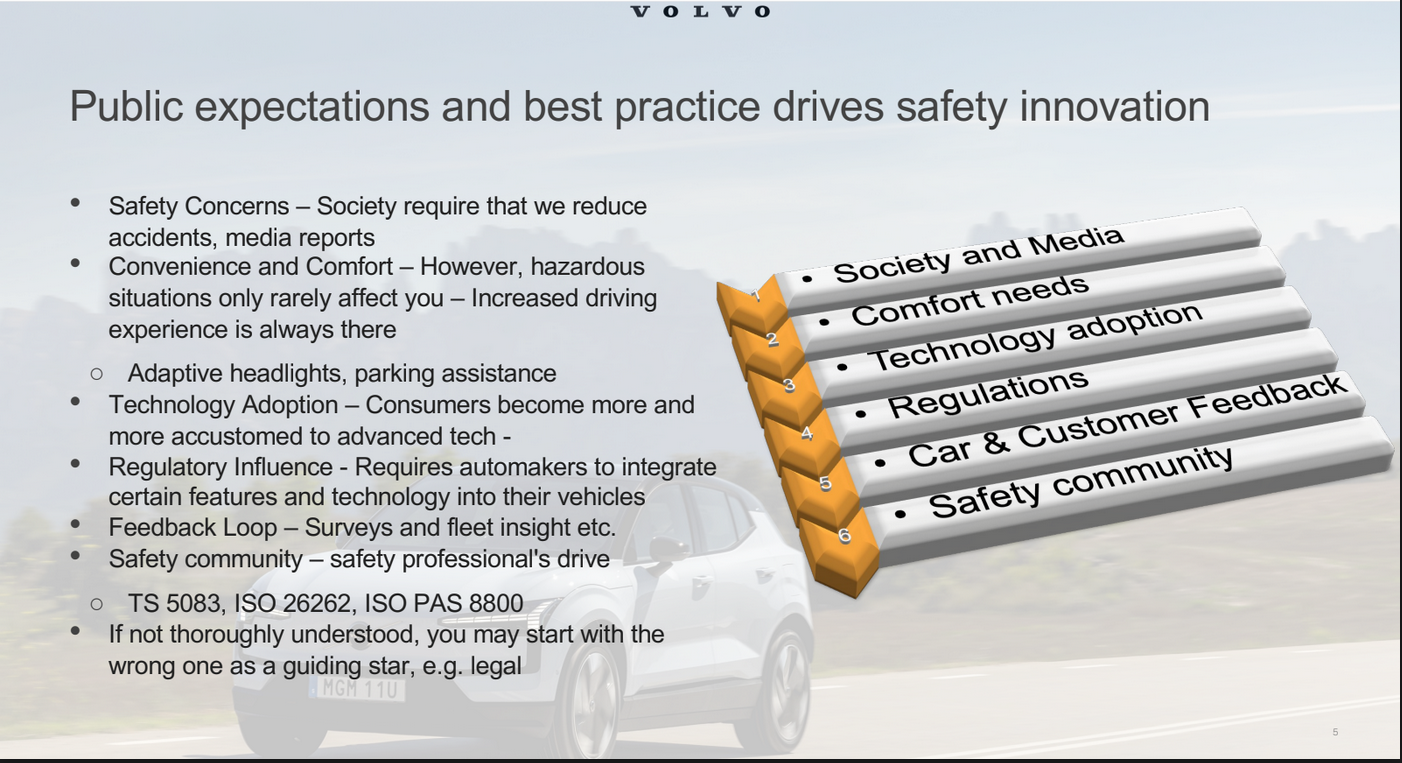
With Håkan Sivenkrona we had an inspiring presentation from our hosting company Volvo, which also will lead into a follow up seminar dedicated to Safety Elements out of Context (SEooC). In today’s dynamic environment, standards are constantly evolving. It is crucial for both proprietary and open systems to adapt to this shifting landscape and embrace continuous safety compliance. As a community, we must come together to explore ways to consistently deliver a Safety Case in the future. Safety systems need to be ready for the usage of open source developed software and open source software need to be enabled to fulfill the demands of various directives, security and safety standards. Public expectations and established best practices will further drive safety innovation.
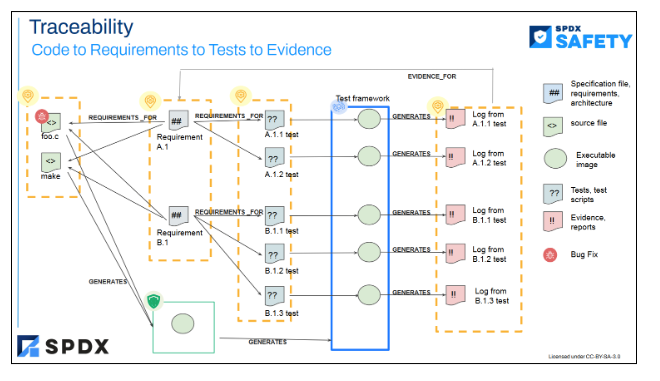
Presentation: SPDX safety profile and implications on code and traceability
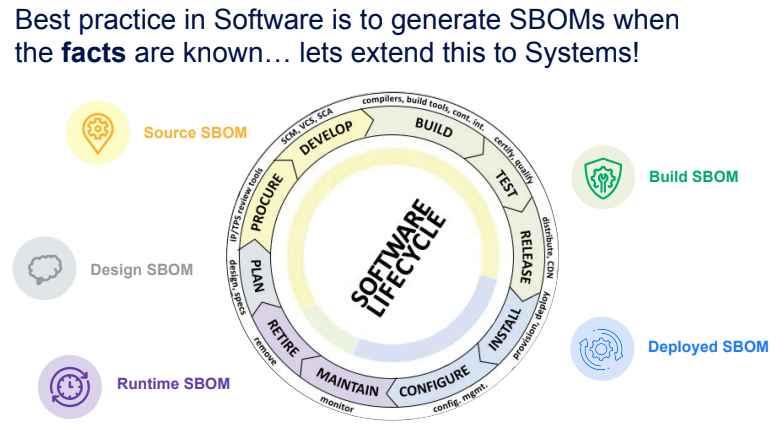
During this session, we discussed the important factors that need to be considered and integrated into the Safety Cases moving forward. We also explored the efforts of the System Package Data Exchange project in capturing metadata to enhance this process. In addition to the Linux kernel and user space software, it is crucial to understand the origin of datasets, model training, and services for effective safety analysis in the future. By automating the generation of this information, we can ensure better traceability of requirements when there are changes in the inputs to the Safety Cases.
Presentation: safety mechanisms to be considered to meet ASIL levels in Automotive
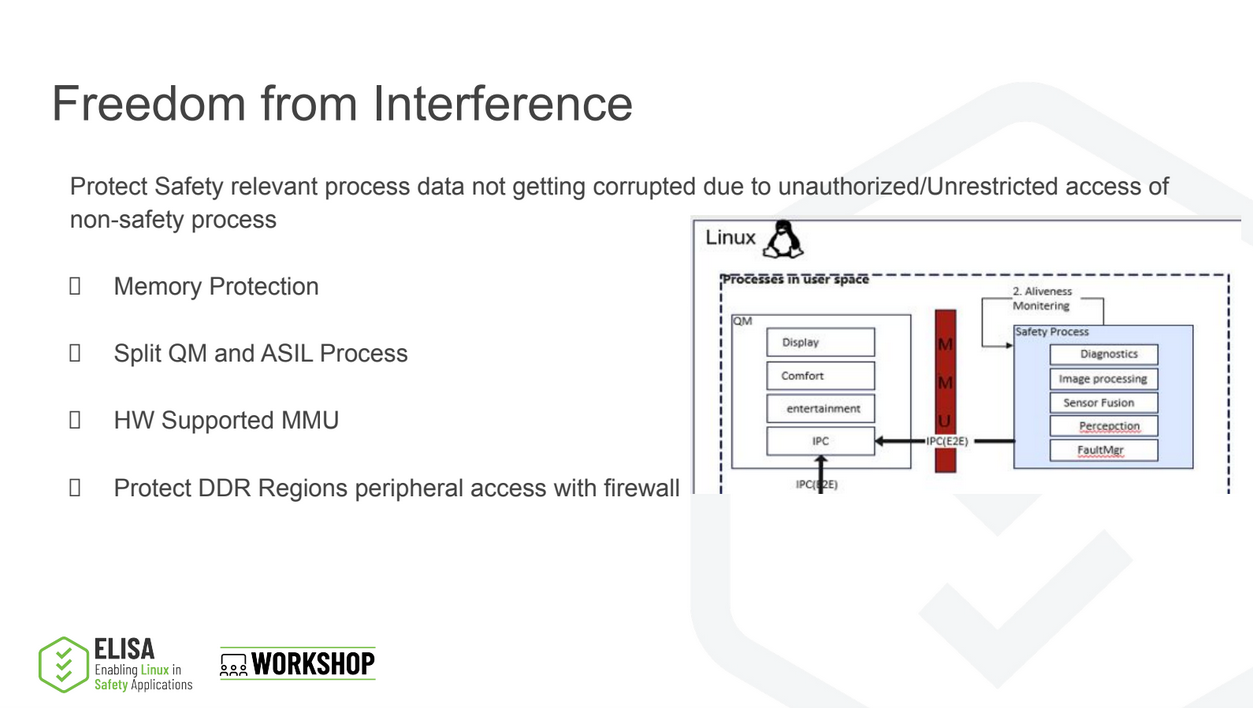
Naresh Ravuri from Magna, provided an excellent overview of the work that they’ve been doing to tackle the top level safety goals from OEM perspective. They emphasized the importance of identifying a critical path even when all requirements are derived. The decomposition of the use case plays a crucial role in ensuring that if one part fails to perform a task, another part can take over. It is essential to have a deep understanding of the Linux system to avoid incorrect system decomposition. Additionally, considering the data-driven path is vital for conducting a thorough analysis. Lastly, it is important not to overlook the impact of the build (compiler) and runtime environments (libraries) on the overall system.
Presentation: ELISA in the world of Software Defined Vehicles
Almost the whole Automotive Industry is currently looking into software defined vehicles with high performance computers (HPCs). During the ELISA workshop the participants discussed this from a practical point of view and what it means to “let it crash”. Coming from Cloud Native it was presented how to plan for potential system failures and how to recover from that. The architectural assumptions are important and how a system is tailored and methods for splitting critical resources from less critical system parts. The presentation was brought to the community by EMQ who are serving multiple automotive customers with MQTT solutions.
Discussion: core parts of the kernel – initial focus on the “TINY” configuration
During the workshop, the approach of starting with the “TINY” config and gradually adding or removing components was discussed. By clearly defining the core set of the linux kernel, it becomes easier to prioritize important aspects which are crucial for the safety argumentation of the kernel. While initially it was considered to avoid hardware and architecture specific code, this may not be feasible. By extending the “TINY” configuration with other components, not only does it enhance the system, but it also demonstrates a methodology for improving the overall functionality of the kernel.
The follow up of the initial discussion on “TINY” will be split across various working groups inside ELISA. The Linux Features working group is already exploring suitable reference hardware like an ARM 64 bit QEMU. The Architecture Working Group will start the analysis based on their input. The build and booting of the reference hardware integrated into a CI is subject to the Systems WG.
Discussion: state of available tooling
The tooling for analyzing the Linux kernel is constantly improving. While there are already several tools integrated into the kernel, we are also exploring the inclusion of additional analysis tools that have shown their usefulness. If you’re interested in understanding call graphs, you can check out the ks-nav tool work available at: https://github.com/elisa-tech/ks-nav
Why ks-nav is important can be extracted also from the slides and get some workshop feeling by clicking on the embedded YouTube links: State of ks-nav.pdf
Summary of workshop and main takeaways
The good mixture of participants continue to bring new ideas into the discussion when meeting in person. In particular the pointing to use of the TINY Linux configuration for the core was brought in by a first time Linaro representative. It is always important to widen the spectrum.
While there is still a long way to go until we have proven processes for enabling Linux in Safety Applications, there are starting to emerge some excellent ideas and as we refine them, we should be able to formalize them. It’s very easy for folks to make destructive statements, but we’re seeing that the open dialog can be turned into a more positive outlook, as illustrated by the engineering approach for safe systems with linux, where discussion landed on defining a design element and building up from there.
It is important to remember that a closed source OS may be as vulnerable as Linux in working with an open source ecosystem. However in Linux we have an open system and can actually see how it operates. Maybe in other closed OS and in company development the same issues show up, but nobody knows about it, as there is no expert and possibility to analyze.
The automotive industry is increasingly interested in utilizing Linux for high-performance computers in vehicles. The complexity of the software-defined vehicle, centralized compute units, and complex system architectures pose challenges for traditional product development using closed-source proprietary real-time operating systems (RTOS). Linux, on the other hand, is capable of meeting these demands, which is why its adoption in the automotive industry is expected to continue to grow, but they still need the path of safety argumentation and certification.
Interesting enough even with slightly different motivation also Aerospace observes wider usage of high performance computers and at same time a wider usage of Linux demanding safety certification. Maybe the next workshop will be hosted in the wider (aero-)space ecosystem to serve the other vertical branch in ELISA more. So, stay tuned for when and where our next Workshop will be.
Still, a lot of work is needed to have a safety argumentation for Linux, but we are making progress.
Thanks to hosts
We would like to express our gratitude to Volvo Cars, especially Robert F, for organizing the venue and hosting us. We also appreciate the walking tour of Lund, the delicious meals, and the fascinating tour of MAX IV (https://www.maxiv.lu.se/). During the tour, the MAX IV team showcased their research using beamlines and accelerators. We learned that Linux is widely used as the IT infrastructure throughout the research site, although it is not considered safety-critical. These examples further demonstrate the trust and widespread adoption of Linux.
As hallway and networking is important when meeting face to face, Volvo arranged a great dinner for the participants where a lot of topics from MAX IV, as well as “the digital safety belt” and the directions of the ISO26262 were discussed and which role Linux plays in all of this. Like Volvo has released their patent on the safety belt for the sake of saving people’s life over making money with a patent many years back, let us hope that the same will happen to software in vehicles and make open source software like Linux the next “digital safety belt”.
Contribute
If any of these topic areas is of interest to you, please feel free to sign up for the mailing lists at https://lists.elisa.tech; show up at one of the working group meetings; and contribute to the discussion.
Written by Philipp Ahmann, Chair of the ELISA Project TSC, and Kate Stewart, Vice President of Dependable Embedded Systems at the Linux Foundation
On October 16-18, ELISA Project gathered at the Red Hat Munich office for an in-person workshop. The event had a great mix of attendees, including both familiar faces and first-time participants, with representatives from non-member companies such as Canonical, Volvo, MBition, Harman, and Valeo. While the workshop was primarily focused on automotive companies, there was also one participant from NASA.
Discussions centered around the core part of Linux, with a need to define what constitutes a core or minimal configuration. It was suggested that distro providers be consulted to determine their kernel configurations. The topic may continue in the architecture working group. A guide and methodology to strip down the kernel to a smaller use case and system-adjusted setting could also be useful.
A major part of the workshop was the discussion around BASIL, a new tool for tracing requirements code and tests that was proposed in the Berlin workshop earlier in the year. Introduced by Red Hat and open sourced just before the event, it has gained interest among other members, including SUSE. SUSE presented their approach on Automotive SPICE SWE processes for complex Open Source Software to get an argumentation around QM state of Linux and components in use of these systems. It is seen as promising by others and will be taken forward. It can be a path towards quality management argumentation of Linux systems.
Nvidia presented a more technical discussion on the kernel level, with a systematic approach to using the Linux kernel in safety scenarios. This was also interesting for Windriver and Elektrobit. The idea is to have a shared list of risk factors and potential interference between system elements. It is a bit of a direction like CVE to CWE if you want to compare it to security.
A session about the SPDX-SIG on Safety focused on requirement traceability with code and tests and gave a good fit to the discussions around BASIL. This was in line with the ELISA’s discussions around enhancing SBOMs to support safety argumentation and evidence.
Sessions were held on how to catch up newcomers, and understand member needs, the ELISA big picture, outreach to adjacent communities, and current challenges to comply with different aspects of the ISO26262 were held as well.
The workshop concluded with a strategy and path towards 2024. ELISA will take a stronger driver towards tools and documentation, with good documentation around PREEMPT_RT being one of these elements. It is further important to show the results so that others can better understand where ELISA is reaching and where it fits into their industrial use cases.
Overall, the workshop was a great success, with many interesting discussions and presentations. The ELISA looks forward to the next workshop and continuing to drive innovation in the Linux ecosystem.
Testimonials
“I am thrilled to have attended the ELISA workshop in Munich, where I gained valuable insights into the complexities of achieving functional safety for Linux, particularly in the automotive industry. The engaging presentations and collaborative discussions with industry experts highlighted the importance of strong collaboration in addressing this challenge.” – Bertrand Boisseau (Canonical)
“I found the ELISA workshop to be very educational and engaging. The speakers were really skilled and had a great understanding of both safety and Linux aspects. I will closely follow ELISA and hope to engage with more OEM presence” – Robert Fekete (Volvo Cars)
Wondering when and where the next ELISA workshop will be held? Keep an eye on upcoming ELISA events.
Interested in getting involved in ELISA? Introduce yourself, ask a question and follow along on Technical Forum, check out the Working Groups and start participating.
Written by Philipp Ahmann, Chair of the ELISA Project TSC and Technical Business Development Manager at Robert Bosch GmbH
In June, the ELISA Project’s core contributors and affiliates came together for three days at the Bosch IoT Campus in Berlin, Germany. We discussed recent achievements, project branding and perception, upcoming goals and next steps.
From left to right: (MBition), Gabriele Paoloni (Red Hat), (Red Hat), Olivier Charrier (Windriver), Dongni Fan (MBition), Leonard Moritz Hübner (NXP), Alex Fomichev (MBition), Christof Petig (Aptiv), Philipp Ahmann (Bosch), Kai Hudalla (Bosch Digital), Johannes Kristan (Bosch Digital), Christopher Temple (ARM), Kate Stewart (Linux Foundation) & Sven Erik Jeroschewski (Bosch Digital)
Quick recap on the three days
The workshop kicked off with a discussion about ELISA’s big picture document. The document serves as an entry point for new contributors to find their path through the ELISA deliverables and approach. It will be a living document which gets updated and enhanced when major achievements are reached. It is structured into 3 major parts and complements the project charter and mission.
The project objective
The ELISA approach (ongoing work to meet the project objective)
Using and putting ELISA results into practice
The second session focused on the creation of a pragmatic guide to best practices for open source contributors to facilitate safety analysis in the future. In this session, Kate Stewart, Vice President of Dependable Embedded Systems and and ELISA Ambassador, shared an overview of existing tools which help to make the kernel development work more discoverable, creating certain traceability, and to make analysis “more provable.” The session addressed a few next steps which the project has to look into:
Capturing current Kernel requirements
Using Linux features
Testing Frameworks
Some parts of the topics were directly addressed as part of the second day agenda. In the first session, the safety analysis approach uses a combination of risk analysis, fault injection, and a high degree of automation. Part of it is also the System Theoretic Process Analysis (STPA). This was already successfully applied within Codethink and taken forward within the Open Source Engineering Process (OSEP) Working Group. The motivation to go in this direction was also made visible and which initial work has been started.
In the following session certain limits of a traditional STPA when applied to the Linux Kernel were pointed out by Red Hat. Additional tool support may be needed which was one reason to create the ks-nav tool. The objective of this tool is to analyze the Linux kernel for safety by presenting diagrams of call trees. In this way an understanding of the interactions and dependencies among different parts of the kernel can be gained for safety analysis. To speed up the development and make the tool more visible, the ks-nav tool resides now in an own repository within the ELISA github organization.
After that, the workshop participants had a longer discussion, whether manpage derived requirements and manpage driven testing can improve the argument towards usage of Linux in safety-critical applications.
It describes a large part of the software components of Linux usage in products
It is the established format to describe and learn the software functionality provided by Linux.
It is used by a large audience.
The workshop participants agreed that there is still a lot of work to map the current kernel implementation to the existing manpages and to close the gaps between both. This will be a great contribution to the whole kernel community. Overall the ELISA project plans to take major actions in the field of Kernel documentation improvements.
In the afternoon session “targets for upstreaming to Linux kernel for the remainder of the year” the topic of upstreaming documentation within the user and admin guide of the Kernel was put into practice. The current activities of the Linux Features for Safety Critical Systems (LFSCS) WG were presented to the workshop participants. Shuah Khan (Linux Foundation Fellow) together with Elana Copperman (Mobileye, LFSCS WG lead) illustrated the different configuration parameters of the PREEMPT_RT patches which are now almost completely upstreamed. However, it turned out that the documentation of the parameter and configuration towards desired usage have large room for improvements. As many safety-critical products rely on certain real time capabilities, ELISA judges this topic as high priority and very important.
The 3rd day concentrated heavily on internal ELISA activities, project health and growth. There was a session revisiting the project messaging along with a session about review of change management workflow, and a proposed approach document to go to the working groups/TSC for approval. In another session the participants brainstormed ideas for community growth and engagement, adjacent community outreach and mutual alignment.
Although the sessions focused on internal work, especially the contributions by affiliated workshop participants representing e.g. Eclipse Software-Defined-Vehicle, ETAS, MBition and NXP added new perspectives, led to good takeaways and made the workshop a success.
Major Workshop Takeaways
During the various sessions and at the end of each day takeaways from the participants were collected and discussed. An extract of major takeaways are listed below:
Rework and structure Kernel documentation is an important element of ELISA
Strong risk of diverging, in case you write documentation by another person than the maintainer of the code.
Start identifying critical subsystems of the Linux kernel to enhance user documentation similar to “workload” and “realtime” documentation.
Identification of the “core” part of the kernel that is present in all set of config images
Looking at user APIs for the “core” parts, may be a useful focus for doing detailed analysis that others can use, and build from
Any analysis has to be tagged to specific release, as changes are happening through time.
Getting the API and subsystem analysis of key pieces upstream, combined with recommendations on testing to demonstrate the user space APIs are consistent. (Maintainer need to agree)
ELISA is not providing a safe Linux, but there are interesting tools supporting Safety with using Linux
If you push a patch to the Linux kernel you have to follow rules (e.g. checkpatch). Maybe there can be kernel tools to improve the safety part of Linux, e.g. that the proposed change/config is in line with the safety guidelines
The kernel alone does not make the operating system, you need other components to create a particular system.
Open Sourcing the Red Hat requirement tool would be a great benefit for the wider open source safety community
Use the requirements tool to export SPDX safety linkage SBOMs for the Linux Kernel
Reach out to Eclipse SDV and AGL with SOAFEE to talk about an example system as part of Systems WG
SDPX and System SBOM may be of interest for Eclipse Foundation (SDV)
OEM may be a must have to work on a real use case in certain domains (especially automotive).
The puzzle pieces on the table may not yet be complete and people may use puzzle pieces differently
Workshops are a good place to learn how the different pieces fit together, SBOM, OSEP, ARCH…
Getting involved
The ELISA Project is open to anyone to participate. While membership is not required for participation, we always love to welcome additional members to join us in the mission of enabling Linux in safety applications and to collaborate with other members who are committed to this effort.
If you are interested to learn more about ELISA or want to participate in one of the working groups or recently started activities, just send an email to the technical forum mailing list. Or you can get advice on where to contribute best by joining the Technical Steering Committee (TSC) meeting which is held every other Wednesday at 13:00 UTC.
Last but not least the next in person workshop is only a few months away. ELISA members currently plan to meet again most likely in Munich, Germany, October 16- 18. Please join the mailing list and/or subscribe to @ProjectElisa or our LinkedIn page or our Youtube Channel to learn more about the next workshop.
Written by Red Hat’s Gabriele Paoloni, Alessandro Carminati & Maurizio Papini
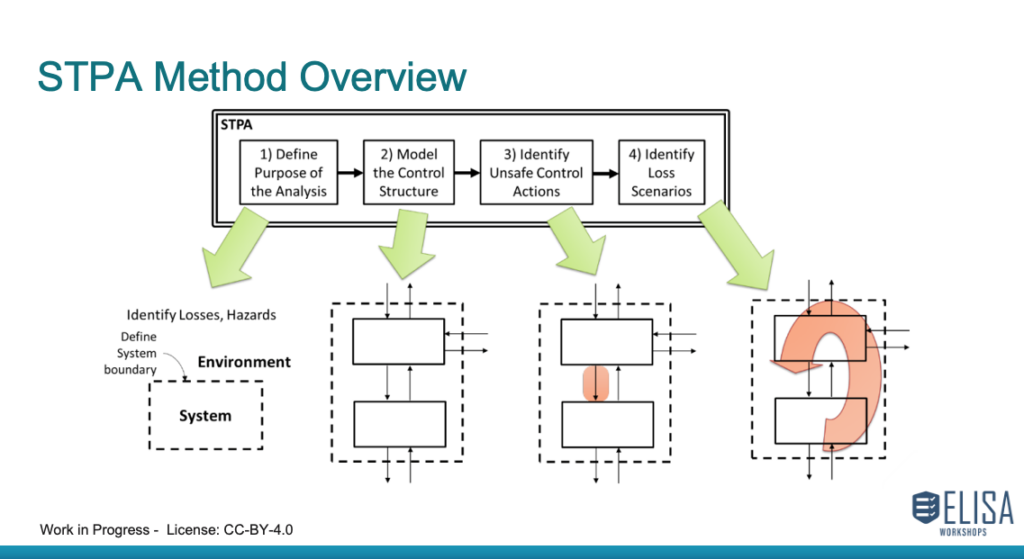
One of the main challenges in using the Linux Kernel for safety-critical systems is conducting safety analyses in the absence of architectural documentation. As outlined in this article, within the ELISA (Enabling Linux in Safety Applications) Project, we are adopting the STPA approach at the system level. Accordingly, the Safety Architecture Working Group has been actively working on implementing and expanding this approach within the Kernel.
To conduct an STPA-inspired analysis, it is necessary to define “controller” entities, along with their corresponding control actions and feedback mechanisms. The Linux Kernel has already been divided into entities, which are maintained by different individuals based on the MAINTAINERS file.
Therefore, the Safety Architecture Working Group has made the decision to experiment with STPA analysis within the Kernel by treating the various subsystems or drivers (as defined in the MAINTAINERS file) as individual controllers. Within this context, the challenge has been to identify the control actions and feedback mechanisms between the drivers and subsystems.
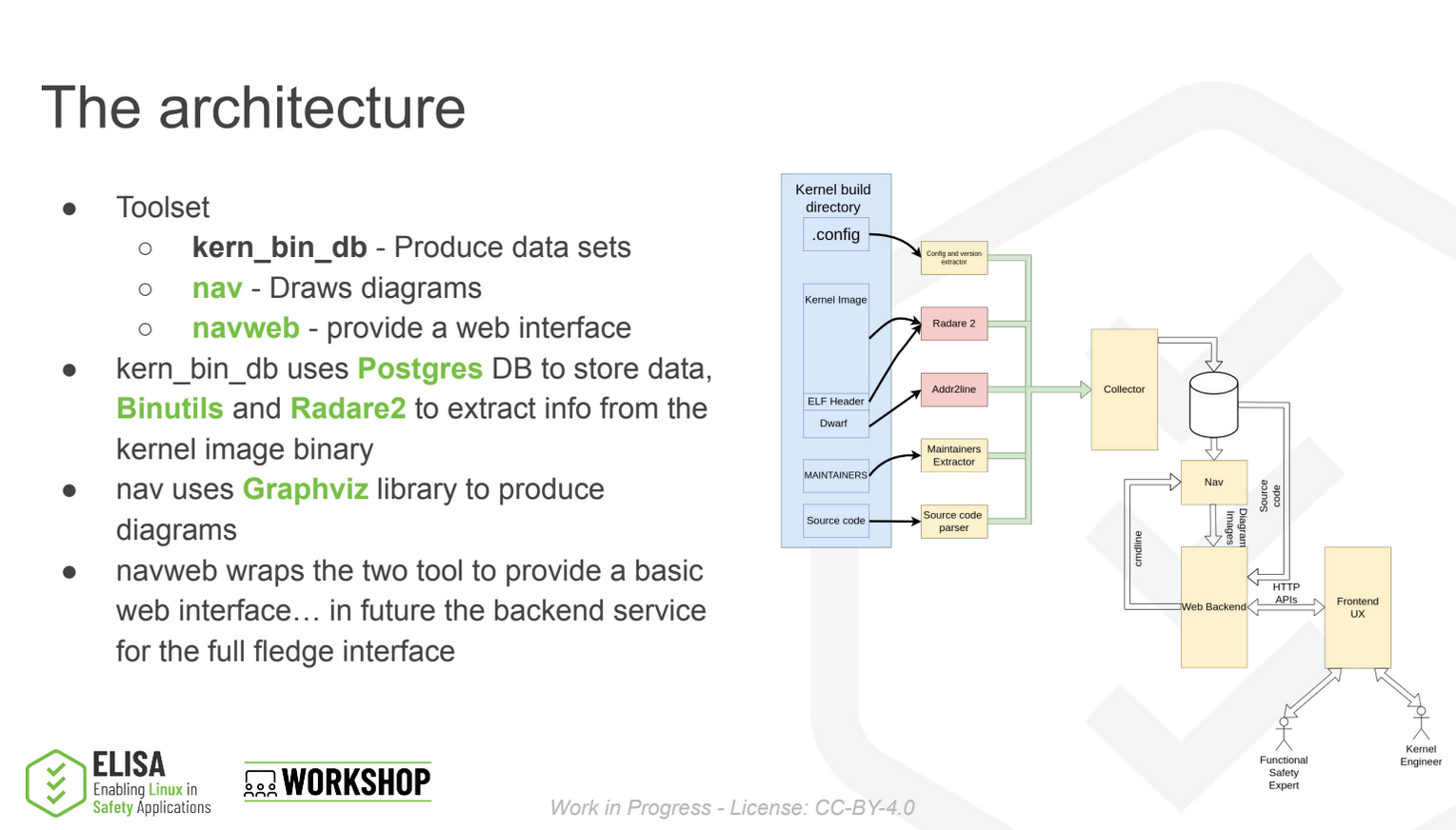
The ks-nav tool set, comprising two complementary tools, is specifically designed to support the identification of such control actions.
To facilitate this, ks-nav offers subsystem call trees, which visually represent the interactions and dependencies among subsystems, starting from a given symbol. This feature allows users to identify potential interfaces between subsystems or drivers that support relevant control actions within the specific context of the symbol under analysis.
Another key feature of ks-nav is the identification of function call trees, which list functions potentially encountered starting from a given one . Such a feature could be useful to understand the subsystem or driver behavior following the invocation of a given function.
In summary, within the context of a specific symbol, ks-nav is capable of initially highlighting potential candidates for control actions between subsystems and drivers. Additionally, it allows users to “zoom in” on each subsystem as necessary to support expert judgment in semantically specifying the control actions.
To accommodate diverse analysis needs, the tool set supports multiple output formats, including dot, raster images (PNG or JPG), and vector images (SVG), facilitating effective visualization.
Flexibility is emphasized with compatibility across different database management systems (DBMS) like PostgreSQL, MySQL, MariaDB, or SQLite. This enables seamless integration with users’ preferred DBMS or existing infrastructure.
Moreover, ks-nav is able to identify indirect calls, including the x86 retpoline technique, within the kernel code, and deals with compiler code optimization.
By offering function call trees, subsystem call trees, versatile output formats, DBMS compatibility, and indirect call detection, the ks-nav tool set provides a comprehensive and efficient solution for ELISA activities in Linux kernel analysis. It provides users with the necessary tools to explore the kernel’s structure, and make informed decisions.
This initial commit of the ks-nav tool set also ensures fair test coverage, guaranteeing reliability and effectiveness in supporting ELISA activities. It marks a milestone, demonstrating the team’s commitment to continuous improvement and future advancements to refine the tool set and meet evolving needs in ELISA activities conducted by the working group.
All are welcome to try out the tools, send pull requests for improvements and bug fixes on the ELISA GitHub here.
There will also be a dedicated session on how to apply this tool at the upcoming ELISA Berlin Workshop June 20-22. Learn more about the Workshop or register for it here.
SAN FRANCISCO – August 11, 2022 – Today, the ELISA (Enabling Linux in Safety Applications) Project announced that Boeing has joined as a Premier member, marking its commitment to Linux and its effective use in safety critical applications. Hosted by the Linux Foundation, ELISA is an open source initiative that aims to create a shared set of tools and processes to help companies build and certify Linux-based safety-critical applications and systems.
“Boeing is modernizing software to accelerate innovation and provide greater value to our customers,” said Jinnah Hosein, Vice President of Software Engineering at the Boeing Company. “The demand for safe and secure software requires rapid iteration, integration, and validation. Standardizing around open source products enhanced for safety-critical avionics applications is a key aspect of our adoption of state-of-the-art techniques and processes.”
As a leading global aerospace company, Boeing develops, manufactures and services commercial airplanes, defense products, and space systems for customers in more than 150 countries. It’s already using Linux in current avionics systems, including commercial systems certified to DO-178C Design Assurance Level D. Joining the ELISA Project will help pursue the vision for generational change in software development at Boeing. Additionally, Boeing will work with the ELISA Technical Steering Committee (TSC) to launch a new Aerospace Working Group that will work in parallel with the other working groups like automotive, medical devices, and others.
“We want to improve industry-standard tools related to certification and assurance artifacts in order to standardize improvements and contribute new features back to the open source community. We hope to leverage open source tooling (such as a cloud-based DevSecOps software factory) and industry standards to build world class software and provide an environment that attracts industry leaders to drive cultural change at Boeing,” said Hosein.
Linux is used in all major industries because it can enable faster time to market for new features and take advantage of the quality of the code development processes. Launched in February 2019, ELISA works with Linux kernel and safety communities to agree on what should be considered when Linux is used in safety-critical systems. The project has several dedicated working groups that focus on providing resources for system integrators to apply and use to analyze qualitatively and quantitatively on their systems.
“Linux has a history of being a reliable and stable development platform that advances innovation for a wide range of industries,” said Kate Stewart, Vice President of Dependable Embedded Systems at the Linux Foundation. “With Boeing’s membership, ELISA will start a new focus in the aerospace industry, which is already using Linux in selected applications. We look forward to working with Boeing and others in the aerospace sector, to build up best practices for working with Linux in this space.”
Other ELISA Project members include ADIT, AISIN AW CO., Arm, Automotive Grade Linux, Automotive Intelligence and Control of China, Banma, BMW Car IT GmbH, Codethink, Elektrobit, Horizon Robotics, Huawei Technologies, Intel, Lotus Cars, Toyota, Kuka, Linuxtronix. Mentor, NVIDIA, SUSE, Suzuki, Wind River, OTH Regensburg, Toyota and ZTE.
ELISA Summit – Hosted virtually for participants around the world on September 7-8, this event will feature overview of the project, the mission and goals for each working group and an opportunity for attendees to ask questions and network with ELISA leaders. The schedule is now live and includes speakers from Aptiv Services Deutschland GmbH, Boeing, CodeThink, The Linux Foundation, Mobileye, Red Hat and Robert Bosch GmbH. Check out the schedule here: https://events.linuxfoundation.org/elisa-summit/program/schedule/. Registration is free and open to the public. https://elisa.tech/event/elisa-summit-virtual/
ELISA Forum – Hosted in-person in Dublin, Ireland, on September 12, this event takes place the day before Open Source Summit Europe begins. It will feature an update on all of the working groups, an interactive System-Theoretic Process Analysis (STPA) use case and an Ask Me Anything session. Pre-registration is required. To register for ELISA Forum, add it to your Open Source Summit Europe registration.
Open Source Summit Europe – Hosted in-person in Dublin and virtually on September 13-16, ELISA will have two dedicated presentations about enabling safety in safety-critical applications and safety and open source software. Learn more.
Founded in 2000, the Linux Foundation and its projects are supported by more than 2,950 members. The Linux Foundation is the world’s leading home for collaboration on open source software, hardware, standards, and data. Linux Foundation projects are critical to the world’s infrastructure including Linux, Kubernetes, Node.js, ONAP, Hyperledger, RISC-V, and more. The Linux Foundation’s methodology focuses on leveraging best practices and addressing the needs of contributors, users, and solution providers to create sustainable models for open collaboration. For more information, please visit us at linuxfoundation.org.
The Linux Foundation has registered trademarks and uses trademarks. For a list of trademarks of The Linux Foundation, please see its trademark usage page: www.linuxfoundation.org/trademark-usage. Linux is a registered trademark of Linus Torvalds.
If you’re new to the project and would like to learn more about the community, ELISA has several upcoming events in September that you can attend to meet ambassadors or project members, receive updates about technical milestones and goals of each of the working groups and ask questions or get involved. Focused Working Groups include Automotive, Linux Features for Safety-Critical Systems, Medical Devices, Open Source Engineer Processes, Safety Architecture, Systems and Tool Investigation and Code Improvement and they are always looking for more participants.
September events:
ELISA Summit – Hosted virtually for participants around the world on September 7-8, this event will feature overview of the project, the mission and goals for each working group and an opportunity for attendees to ask questions and network with ELISA leaders. View the schedule here. Registration is free and open to the public. https://elisa.tech/event/elisa-summit-virtual/
ELISA Forum – Hosted in-person in Dublin, Ireland, on September 12, this event takes place the day before Open Source Summit Europe begins. It will feature an update on all of the working groups, an interactive System-Theoretic Process Analysis (STPA) use case and an Ask Me Anything session. Pre-registration is required. To register for ELISA Forum, add it to your Open Source Summit Europe registration.
Open Source Summit Europe – Hosted in-person in Dublin, Ireland, and virtually on September 13-16, ELISA will have two dedicated presentations about enabling safety in safety-critical applications and safety and open source software. Learn more.
ELISA Workshop – Hosted in-person in Manchester, England, at Codethink offices. This workshop offers an opportunity for active ELISA contributors and members to have interactive discussions on predetermined topics and have side-by-side working sessions. Learn more.
The Spring ELISA Workshop, which took place on April 5-7 virtually, had more than 130 global registrants that learned more about the various working groups, hot topics related to enabling linux in safety applications and networked with ambassadors. If you missed the workshop, you can check out the materials here or subscribe to the new ELISA Youtube Channel and add these sessions to your watch list.
In April, Raffaele Giannessi, Industrial PhD, and Fabrizio Tronci, Functional Safety Manager and Alessandro Biasci, Project Manager at Huawei, presented a session titled, “Hazard Analysis Application to Complex Software.” In this talk, they showcase the methodology to apply STPA to software non-physical system and application of case study on dynamic memory allocation.
Watch the video below.
If you are interested in learning more about the ELISA Project, please join us at one of the September events:
ELISA Summit, a virtual conference happening on September 7-8 . ELISA ambassadors and leaders will offer an introductory overview of the project, more in-depth technical content, emerging trends, and hot topics related to open source software in safety-critical applications. Register to attend at no cost here: https://events.linuxfoundation.org/elisa-summit/register/.
ELISA Forum, in-person in Dublin, Ireland on September 12. This is a co-located event with Open Source Summit Europe. ELISA Ambassadors and leaders will offer an overview of the project, the activities of the various working groups (WGs) and how the WGs interact and work together to tackle the challenges in advancing open source in safety-critical systems and bridge the gap between functional safety and Linux kernel development velocity. There will also be in-depth updates for the System-Theoretic Process Analysis (STPA) methodology to a sample use case and a Q&A session. Pre-registration is required. To register for ELISA Forum, add it to your Open Source Summit Europe registration.
The Spring ELISA Workshop, which took place on April 5-7 virtually, had more than 130 global registrants that learned more about the various working groups, hot topics related to enabling linux in safety applications and networked with ambassadors. If you missed the workshop, you can check out the materials here or subscribe to the new ELISA Youtube Channel and add these sessions to your watch list.
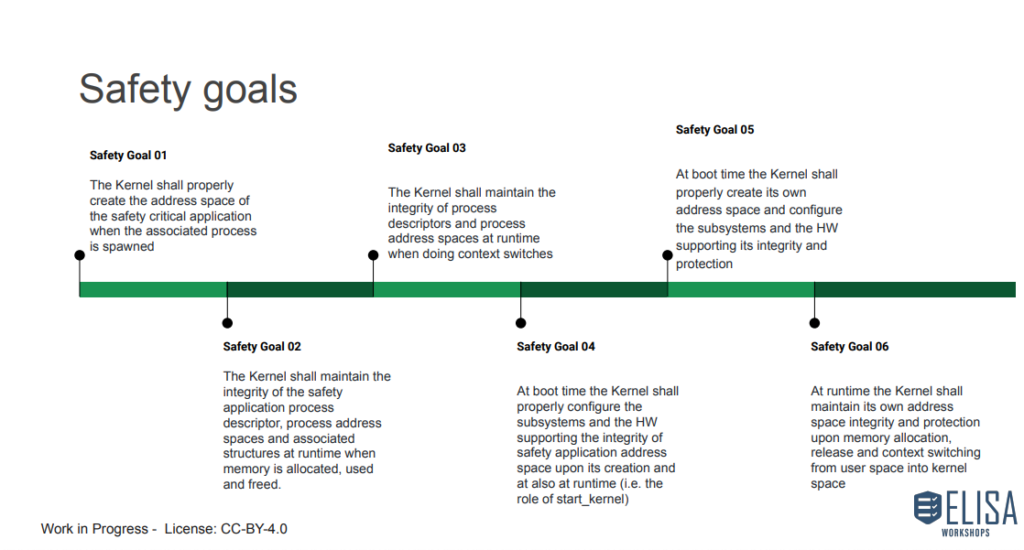
Red Hat’s Christoffer Hall-Federiksen, Senior Software Engineer, and Gabriele Paoloni, Senior Principal Software Engineer and Chair of the ELISA Project Governing Board, presented a session titled, “Integrity of the Safety Application Address Space.”
In this video, you’ll get an overview of the address space descriptors and critical Linux Kernel code involved along different scenarios (process creation, memory allocation, context switch, etc.), safety goals and an interactive discussion on the next steps.
The Spring ELISA Workshop, which took place on April 5-7 virtually, had more than 130 global registrants that learned more about the various working groups, hot topics related to enabling linux in safety applications and networked with ambassadors. If you missed the workshop, you can check out the materials here or subscribe to the ELISA Youtube Channel and add these sessions to your watch list.
At the workshop, Shuah Khan, Chair of the ELISA Technical Steering Committee (TSC) and Kernel Maintainer and Linux Fellow at the Linux Foundation, joined Kate Stewart, ELISA TSC member and co-chair of the Medical Devices Working Group, to kick off the workshop with an introduction to the ELISA Project.
You can view the video below, which is intended for new community members interested in the project and those who aren’t regular participants in the working groups.
We invite you to join a working group to learn more! Click here to check out the working groups and subscribe to their mailing lists and calendars to join meetings.