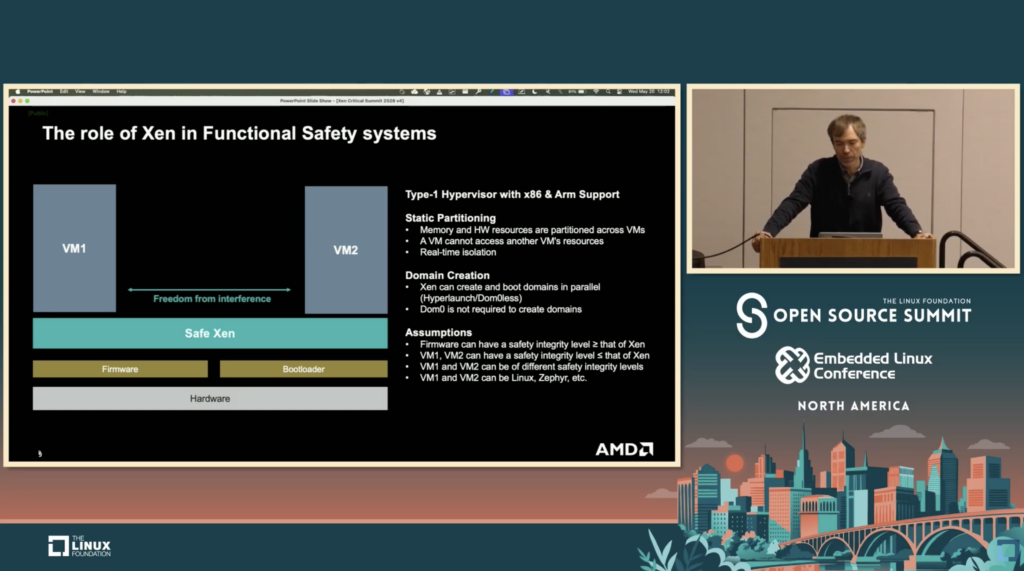
The Final Phase of Xen Safety: Solving Coverage and Residual Gaps – Stefano Stabellini, AMD July 22, 2026 | elisaproject
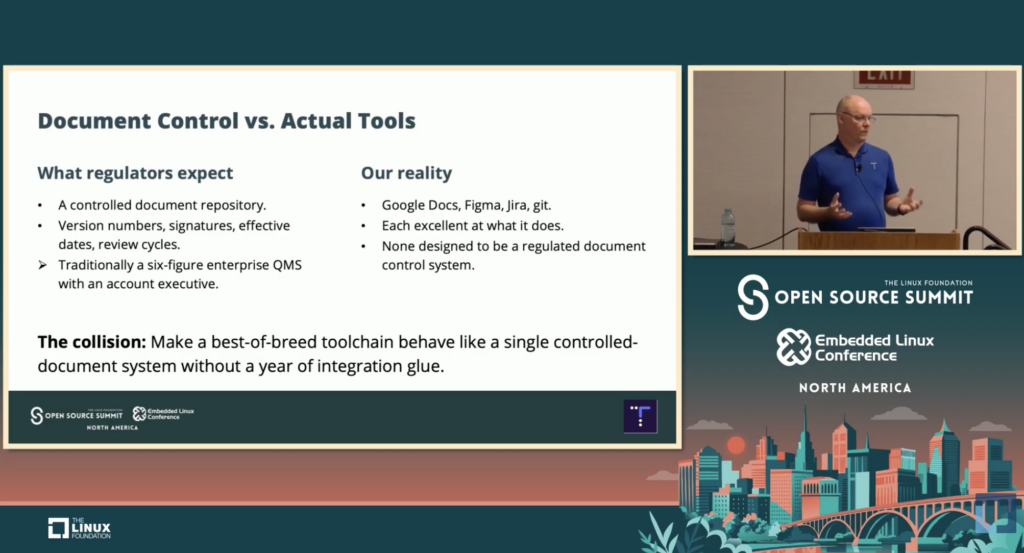
From Pull Request To Patient Safety: How Tidepool Built an Open-Source Quality Management System July 15, 2026 | elisaproject
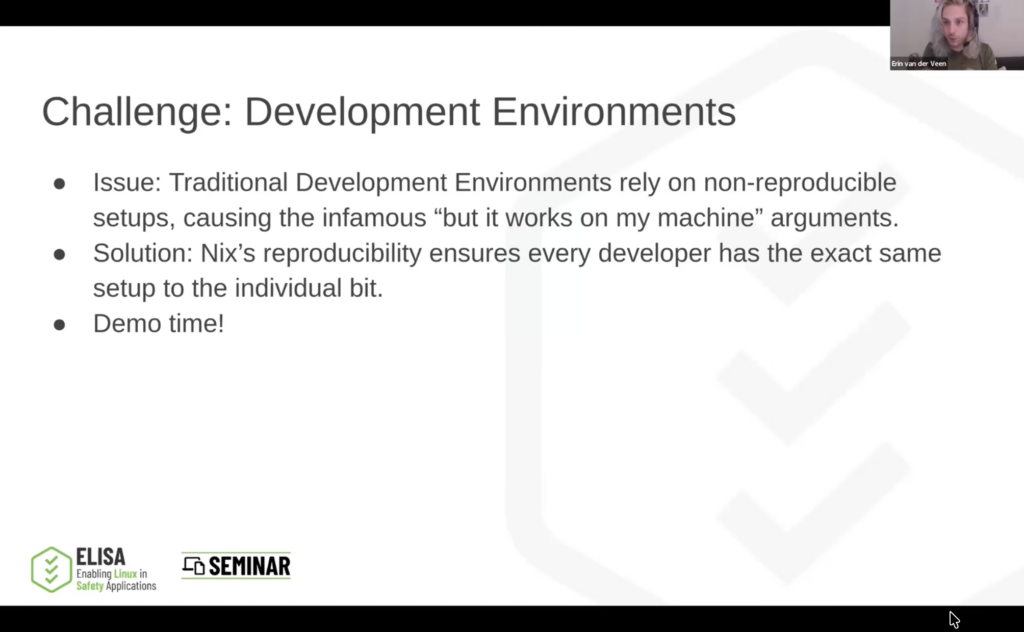
How AvioNix Supports Reproducibility and Traceability for Linux in Avionics July 8, 2026 | elisaproject
Software Supply Chain Management With the Yocto Project – Joshua Watt, Garmin July 1, 2026 | elisaproject
Modernizing Software Verification – Craig Christianson, United States Air Force June 24, 2026 | elisaproject
ELISA Project Momentum Continues: Join Us at Upcoming Workshops, Safety Track Sessions, and Open Source Events June 3, 2026 | elisaproject
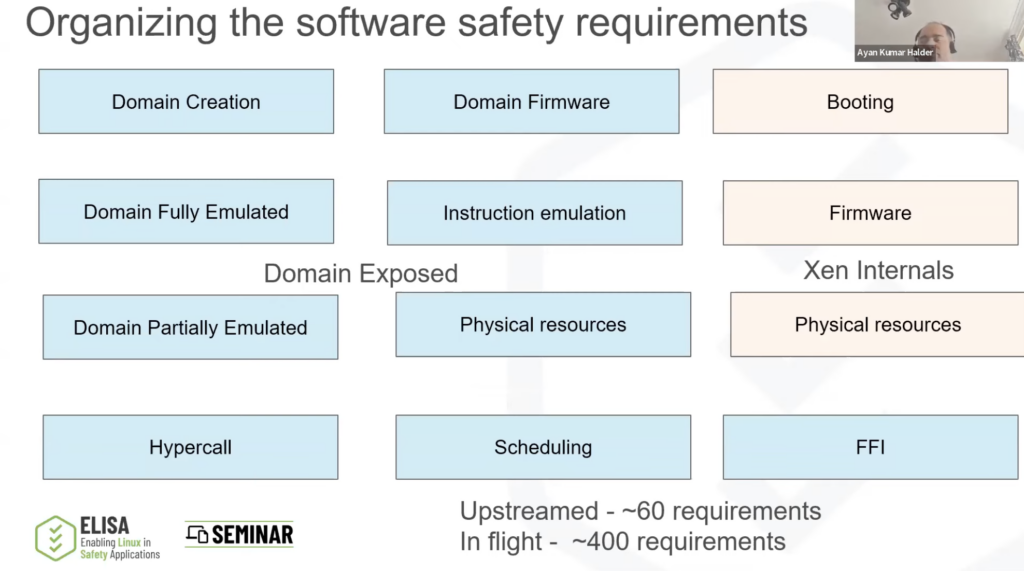
Recap – ELISA Seminar – Functional safety with Xen, Zephyr and Linux for avionics, automotive and industrial May 27, 2026 | elisaproject