Stress-ng has a proven track record for stress testing Linux systems and forcing out system bugs. As past of the ELISA Seminar series, Colin King, Principal Engineer at Intel, gave a presentation titled, “Improved System Stressing with stress-ng.” His talk describes new stress-ng features and the future roadmap for stress-ng.
<!– wp:paragraph –>
The ELISA Seminar Series focuses on hot topics related to ELISA’s mission to define and maintain a common set of elements, processes and tools that can be incorporated into Linux-based, safety-critical systems amenable to safety certification. Speakers are members, contributors and thought leaders from the ELISA Project and surrounding communities. Each seminar comprises a 45-minute presentation and a 15-minute Q&A, and it’s free to attend. You can watch all videos on the ELISA Project Youtube Channel ELISA Seminar Series Playlist here.
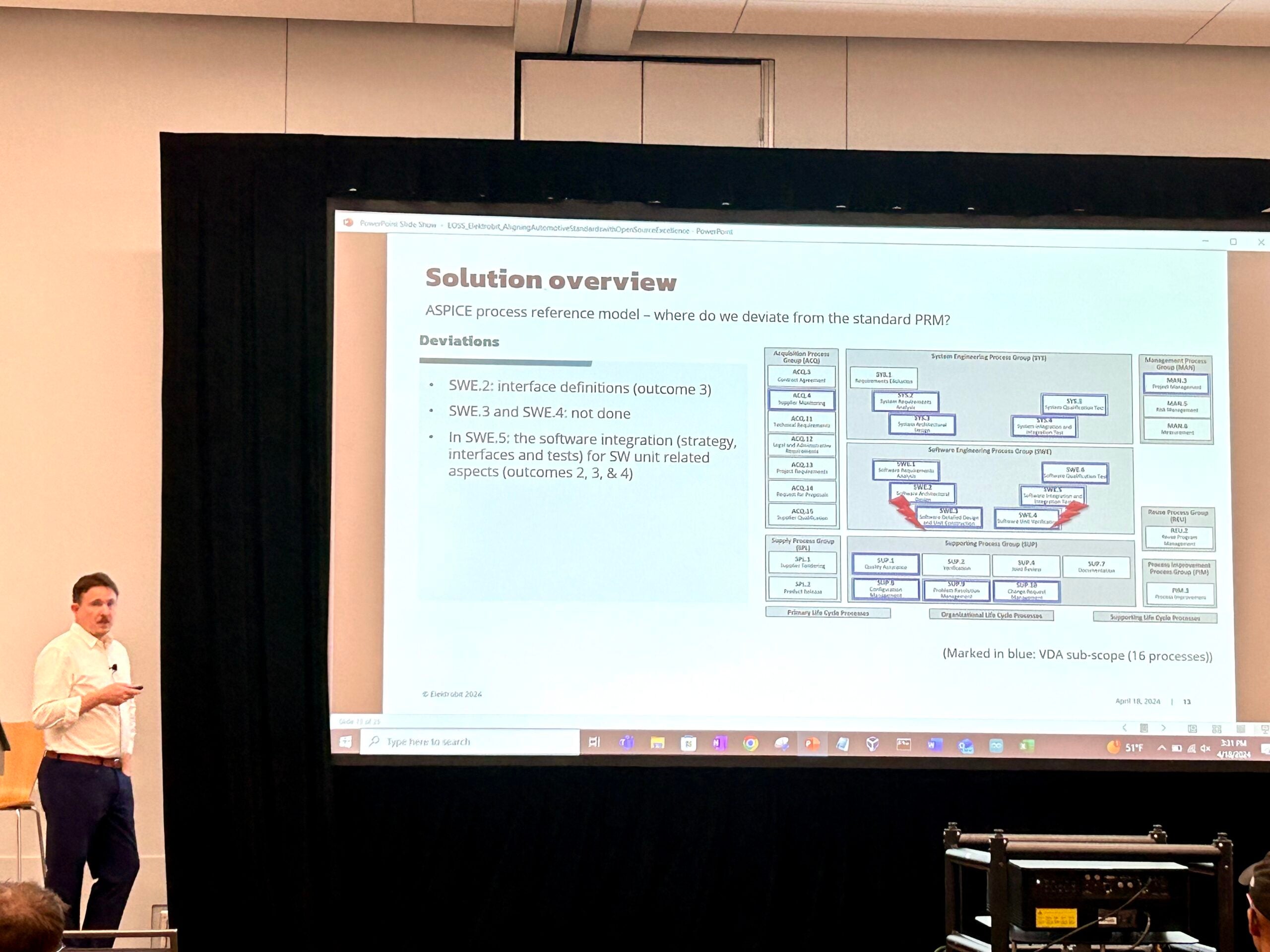
Free and open-source software (FOSS), particularly Linux, is gaining traction in automotive embedded solutions and High-Performance Computing Platforms due to its advantages over proprietary alternatives. However, assuming liability for FOSS-based issues presents challenges in software quality assurance and risk control. The automotive industry, relying on the ASPICE maturity model and safety standards for assessment, faces a mismatch with the decentralized nature of FOSS development, driven by community contributions. FOSS’s decentralized quality assurance measures make single-entity regulation impractical, compounded by the extensive Linux code base, rendering low-level ASPICE Process Reference Model processes economically infeasible.
This presentation proposes a tailored approach incorporating ASPICE with compensation measures for FOSS specifics. This aims to achieve quality assurance and risk mitigation goals, enabling assessment through the ASPICE Process Assessment Model and adherence to functional safety standards. The video details these strategies, emphasizing a nuanced approach harmonizing FOSS principles with industry standards for reliability and safety in automotive computing. Watch here:
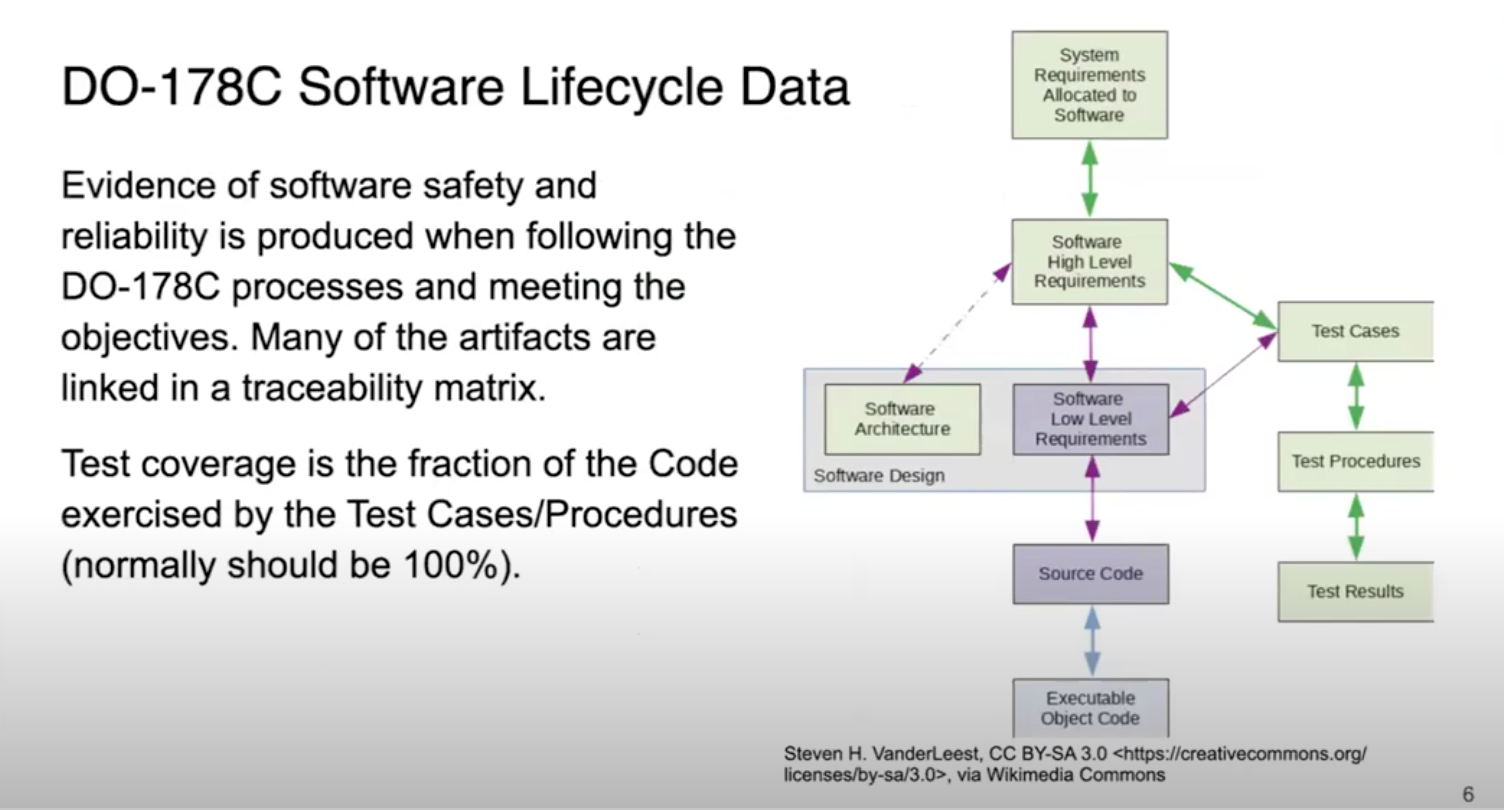
Although the Linux operating system has been used widely in many industries, adoption in aerospace has been slow due to the rigorous assurance evidence required as part of flight certification. The guidance for commercial flight software in most of the world is RTCA DO-178C, which identifies five progressively more rigorous levels of assurance. Providing the software life cycle data outlined by DO-178C is a daunting task for software as large and complex as Linux. In this project we focus on three objectives from DO-178C related to code coverage — the fraction of the source code that is exercised by testing. The three types of code coverage in DO-178C are statement coverage, decision coverage, and Modified Condition/Decision Coverage (MC/DC). The last of these, MC/DC, is only required for Software Level A, the highest level of assurance.
For operating system kernels like Linux, measuring code coverage is challenging because of the unique execution environment compared to user space. Measuring MC/DC is even harder given the intricacy of the metric and limitations of tools. We share our experience in measuring Linux kernel’s code coverage, with an emphasis on MC/DC. We describe how we have enabled measuring Linux kernel’s MC/DC for the first time, by enhancing both the toolchain and the kernel itself. We also discuss the generalizability of our approach across different kernel versions and opportunities for improving coverage with kernel testing suites like KUnit and kselftest.
The ELISA Seminar Series focuses on hot topics related to ELISA’s mission to define and maintain a common set of elements, processes and tools that can be incorporated into Linux-based, safety-critical systems amenable to safety certification. Speakers are members, contributors and thought leaders from the ELISA Project and surrounding communities. Each seminar comprises a 45-minute presentation and a 15-minute Q&A, and it’s free to attend. You can watch all videos on the ELISA Project Youtube Channel ELISA Seminar Series Playlist here.
Ferrocene is a fully open source toolchain to enable the use of the Rust programming language in safety-critical environments. It is a proper downstream of the main Rust compiler – rustc. This includes all documentation.
The mission of Ferrocene is to bring open source practices to safety-critical industries and improve the Rust open source ecosystem through safety-critical practices.
Ferrocene is also fully qualified using only open source tooling.
But what does that mean in practice? In this talk, I’ll walk you through our findings when qualifying the Ferrocene compiler toolchain using fully open source tools. A particular eye will be on the conditions that enabled the Ferrocene project to build a feedback loop with the Rust project and how they may inform your approach towards other FOSS projects.
The ELISA Seminar Series focuses on hot topics related to ELISA’s mission to define and maintain a common set of elements, processes and tools that can be incorporated into Linux-based, safety-critical systems amenable to safety certification. Speakers are members, contributors and thought leaders from the ELISA Project and surrounding communities. Each seminar comprises a 45-minute presentation and a 15-minute Q&A, and it’s free to attend. You can watch all videos on the ELISA Project Youtube Channel ELISA Seminar Series Playlist here.
The world of embedded systems is multifaceted – from hardware and software to services and tools. The embedded world Exhibition & Conference brings the entire embedded community together once a year in Nuremberg and provides a unique overview of the state-of-the-art in this versatile industry. Last year, the conference hosted 952 exhibitors and 26,630+ visitors from all over the world. This years event, scheduled for April 9-11, is expected to be even larger.
Enabling Linux in Safety Applications (ELISA) Project will be at the event in the Collabora booth (Hall 4- booth 404) with a system demonstrator.
The ELISA System Demonstrator:
Heterogenous example system, fully based on Open Source, consisting of Linux, Zephyr (RTOS), and Xen (Virtualization)
Represents recent SW architectures found in industries like Automotive Software Defined Vehicles and Aerospace
Focus on reproducibility as blueprint for future systems
Running on Xilinx Ultrascale ZCU102 and on qemu
GitHub documentation & Gitlab CI
Various use cases documented like device pass through of SD card and NIC, para virtualization of network and different Linux guests
To kickoff 2024, ELISA hosted an annual Working Group Update where all of the leads share a quick overview, milestones achieved and plans for the new year. The update meetings, which was hosted online for a few hours over two days, was open to the public. If you missed the meeting, the videos can be found on-demand on a new Working Group playlist on the ELISA Youtube Channel.
Each week, we’ll feature a new Working Group video and details for how to get involved in meetings and join the discussions. Today, we shine a spotlight on the Automotive Working Group led by Philipp Ahmann, Chair of the ELISA Project Technical Steering Committee and Technical Business Development Manager at Robert Bosch GmbH. Watch the video below or check out the PPT here.
ELISA is open to everyone. Anyone can develop and contribute code, get elected to the Technical Steering Committee, or help steer the project forward in any number of ways.
To kickoff 2024, ELISA hosted an annual Working Group Update where all of the leads shared a quick overview, milestones achieved and plans for the new year. The update meetings, which was hosted online for a few hours over two days, was open to the public. If you missed the meeting, the videos can be found on-demand on a new Working Group playlist on the ELISA Youtube Channel.
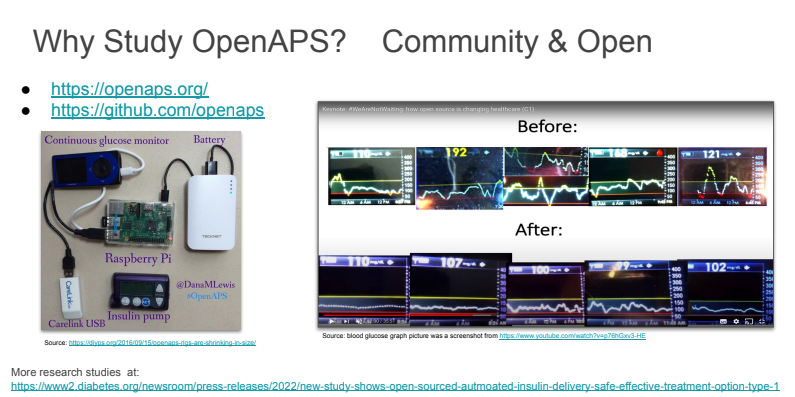
Each week, we’ll feature a new Working Group video and details for how to get involved in meetings and join the discussions. Today, we shine a spotlight on the Medial Devices Working Group, led Kate Stewart, Chair of the Medical Devices Working Group and Vice President of Dependable Embedded Systems at the Linux Foundation, and Milan Lakhani, Vice-chair of the Medical Devices Working Group and Software Engineer at Codethink. Watch the video below or check out the PPT here.
ELISA is open to everyone. Anyone can develop and contribute code, get elected to the Technical Steering Committee, or help steer the project forward in any number of ways.
In 2018, in the course of the SIL2LinuxMP project, we summarized the knowledge gained around research questions and suggested potential solutions using Linux in safety-related systems in the paper “Certifying Linux: Lessons Learned in Three Years of SIL2LinuxMP.” Since then, the activities using Linux in safety-related systems has continued to attract more experts and more commercial attention. However, it is still a challenging activity to pursue. In this video, we explain, reflect and comment the areas of work and activities that have been followed the next five years throughout the industry and how they relate, complement initial ideas that were collected in the SIL2LinuxMP project.
The ELISA Seminar Series focuses on hot topics related to ELISA’s mission to define and maintain a common set of elements, processes and tools that can be incorporated into Linux-based, safety-critical systems amenable to safety certification. Speakers are members, contributors and thought leaders from the ELISA Project and surrounding communities. Each seminar comprises a 45-minute presentation and a 15-minute Q&A, and it’s free to attend. You can watch all videos on the ELISA Project Youtube Channel ELISA Seminar Series Playlist here.
To kickoff 2024, ELISA hosted an annual Working Group Update where all of the leads shared a quick overview, milestones achieved and plans for the new year. The update meetings, which was hosted online for a few hours over two days, was open to the public. If you missed the meeting, the videos can be found on-demand on a new Working Group playlist on the ELISA Youtube Channel.
Each week, we’ll feature a new Working Group video and details for how to get involved in meetings and join the discussions. Today, we shine a spotlight on the Aerospace Working Group, led by Steven H. VanderLeest, Chair of the ELISA Aerospace Working Group and Chief Technologist at Boeing. Watch the video below or check out the PPT here.
Engage with the Aerospace Working Group:
Attend a meeting:
The Aerospace WG meets on the 1st Wednesday and 3rd Thursday each month.
ELISA is open to everyone. Anyone can develop and contribute code, get elected to the Technical Steering Committee, or help steer the project forward in any number of ways.
Written by Igor Stoppa, Senior Software Architect at NVIDIA and ELISA Project contributor
The ELISA Project’s Open-Source Engineering Process (OSEP) Working Group examines how software engineering processes can be used to facilitate the certification of safety-critical systems incorporating Linux and other FOSS. They aim to consider the roles that a Linux-based OS might have in such systems, and identify how FOSS developers, system integrators and product creators can specify these, and provide evidence to support associated safety arguments.
These documents below, which were contributed to the ELISA PROJECT OSEP WG are intended to help functional safety professionals, linux kernel developers, assessors and oems find a common ground:
Although they are not written in the formal language typical of Functional Safety, they cover important technical aspects that might not be obvious to those who are not familiar with Linux.
They can also help with introducing FuSa concepts to Linux engineers and can be a supporting tool to anyone trying to reach safety goals on a system based on Linux.
Ideally, they can help both assessors and OEMs who are either transitioning or considering the transition to a Linux based system, in evaluating the offerings and FuSa solutions that they have available.
Check out the contributions and learn more about the OSEP WG here.