

Written by Philipp Ahmann, Chair of the ELISA Project TSC (Robert Bosch GmbH) and Sudip Mukherjee, Member of the Tools Working Group (Codethink Ltd)
This article describes how the ELISA Project has enabled Continuous Integration (CI), using the Automotive working group use case as an example. The key goals are to:
- Make it easier for others to onboard the project
- Experience deliverables from the various working groups
- Make the work reproducible and more dependable
Additionally, it describes which elements are part of the pipeline along with the tools involved in the creation and testing of the release images. A remarkable element is that the complete pipeline is coupled to the documented development flow. This means that the CI reproduces the steps a developer would do on a PC.
In this way, it approaches people who are new to safety as well as those which are new to Linux. It is a collaborative approach of multiple working groups within ELISA and should foster more collaboration in upcoming ELISA activities.
Motivational factors that enable the CI
In a collaborative project, people of different interests and technical backgrounds unite to work together. After a successful onboarding process, it is important that contributions and work results become visible to the wider community. They need to be properly basellined and distributed fastly to stakeholders.
A high degree of automation increases the dependability of the development process and reduces failures introduced by human slip. It also gives more time back to developers as they do not have to do everything from scratch.
The ELISA project also relies on external sources for support – for example – the Linux Foundation sister projects Automotive Grade Linux (AGL) and the Yocto Project. The CI guarantees the rebuild whenever updated packages from AGL or Yocto are provided.
In summary, one can say that these demands drive the enablement of the CI within ELISA Automotive WG and put a set of requirements to it:
- A entry point for stakeholder with different (technical) background and experience
- A respect of different stakeholder interests in the work products
- Faster ramp-up for new project contributors
- Better and faster integration and distribution of new features and improvements
- Automated and dependable software product creation
- Extendable testing to validate concepts and assumptions.
With the successful setup of the prototype for the automotive use case, the goal is to scale towards more complex architectures as tackled within the ELISA Systems WG. The basic approach and tools will remain the same in the extension towards new use cases.
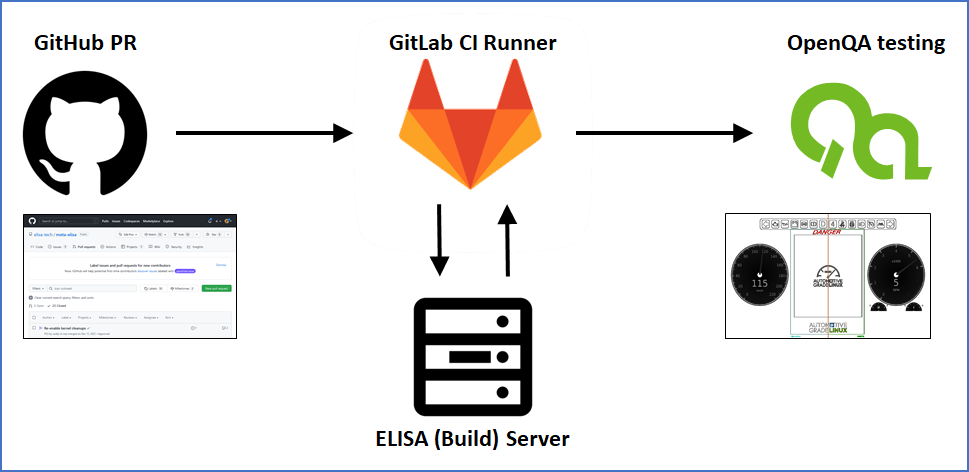
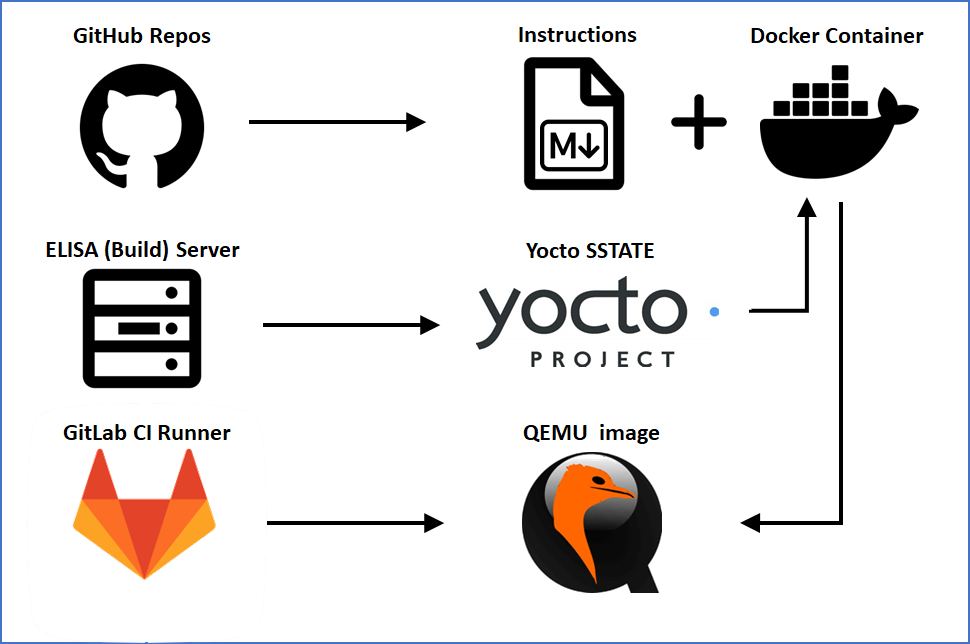
The elements currently involved in the CI include:
- GitHub PRs
- GitLab Runner
- Docker files & images
- A separate build server
- Cached build artifacts („sstate“)
- Generated images as work product
- OpenQA for testing generated images.
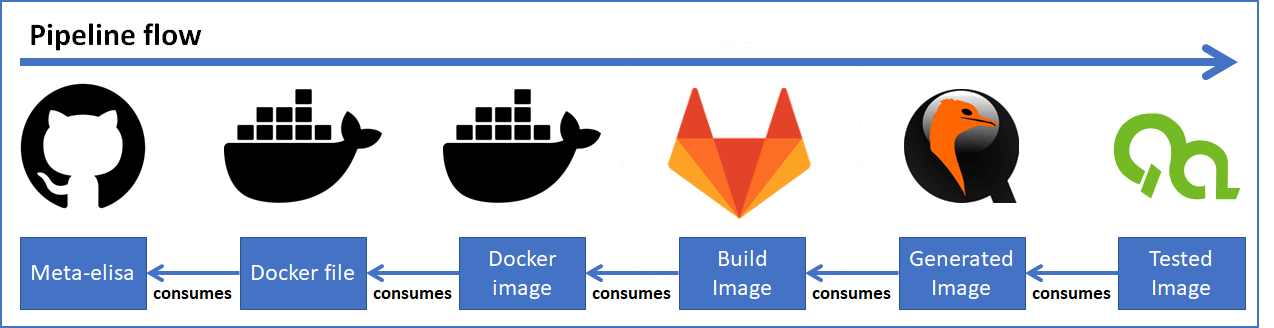
All elements are coupled and tied together to build a dependency chain, which makes it easier to automatically detect failures, caused by changes along the elements of the pipeline.
The CI elements and flow within ELISA
The ELISA Project uses GitLab to run the CI pipeline, which interacts with an ELISA hosted build server (which is also used for other purposes as running tools for code improvement). The build sources are taken from Automotive Grade Linux Gerrit, Yocto Project repositories as well as the ELISA GitHub repositories.
Currently, the generated build artifacts are the kernel and root filesystem for QEMU x86_64 image. It is planned to extend these to additional images for physical hardware in the future.
While the CI is running in GitLab, ELISA is hosting source code and documentation in GitHub. This is the starting point of the CI flow.
The build is triggered on a regular basis once per day to provide a fresh image and check the functionality of the generated image. Due to the usage of cached build artifacts, the longer build times of a full yocto build are reduced to a minimum (in the range of 15 minutes). The generated images are only kept for one day, so that a new download will always have the latest changes included. This further supports the idea of continuous integration. The latest image can be downloaded from the GitLab project packages.
Also a manual trigger of the CI can be done by referencing a GitHub branch of meta-elisa from a PR. In this way a pre-check from changes is possible before formal images are released from the master. It further reduces eventual regressions. To avoid misuse, access to trigger new builds from referenced GitHub forks is restricted to ELISA working group members.
The strong bound of build server to documentation also makes sure that the docker file for manual build is used to create a docker image, which is then used to create the build artifacts for the QEMU image. Also, this is newly created on a regular basis, to make sure that documentation and tool updates will always result in a working image using the latest documentation.
This is needed to achieve the different entry points for the stakeholders who want to try ELISA artifacts or contribute to the project work.
Dependency to the AGL instrument cluster demo
As already mentioned before, but not directly visible from the build flow, is the dependency to the AGL instrument cluster demo. As ELISA collaborates with AGL, it enhances the existing work of AGL and uses it for demonstrating. The results are still a work in progress; therefore the generated meta-elisa layer is not integrated into the formal AGL repositories (yet). Missing this upstreaming causes the risk that the ELISA automotive WG tell-tale demo will break in case AGL makes changes to interfaces used by ELISA. Similar changes can happen for changes in the yocto-poky base.
By building on a daily basis and testing the generated images for the added functionality, it is guaranteed that any breaking change will become directly visible and immediate actions can take place. In these scenarios the latest image will not be deployed for download and analysis of the reported errors can be done.
As a full yocto build can be resource intensive and time consuming the use of cached build artifacts with an enabled SSTATE helps to reduce the build time to a minimum.
Benefits of using Yocto’s SSTATE cache
Building a yocto AGL image from scratch is taking time and a lot of computation performance. At least 100GB of disc space is consumed and a build can easily take several hours to complete even on decent hardware.
In order to reduce the build time and limit the necessary disc space, it is possible to turn on cached build results. The so-called SSTATE is created with the first full build and shared for upcoming builds, demanding to only build deltas. Any change in sources and updates are detected and necessary binaries and their dependencies will be recompiled in case needed.
The generated cache is used within the CI, but can also be used for a local build at a developer PCc.
Additionally, from time to time a new cache is generated to check that the build will also work in case someone builds the system from scratch. Building from scratch can make sense for low network speeds or networks with traffic limitations. This further makes sure that the GitLab pipeline fits to the documentation as much as possible.
GitLab pipeline coupling to the meta-elisa documentation
The GitLab pipeline basically represents the steps which users would take when manually creating the ELISA enhanced demo of the instrument cluster provided by Automotive Grade Linux. As the current version is based on QEMU it is easy to reproduce the demo at a local machine and also to perform automated testing. This is illustrated by transferring the created images to the OpenQA server hosted by Codethink.
OpenQA testing
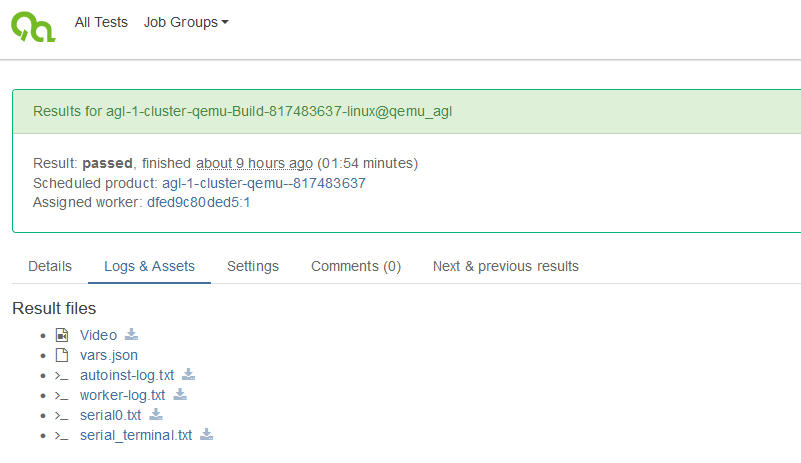
It is important to confirm that the build was successful. As the original AGL demo has been enhanced with the Signal-Source-Control application, which also renders additional screen content, it makes sense to do an output comparison. For the meta-elisa demo OpenQA was used as a proven tool to check proper boot and functionality of the code modifications. This should also avoid potential regressions, e.g. due to external dependency or interface changes. An example output of a comparison as generated by OpenQA can be found below.
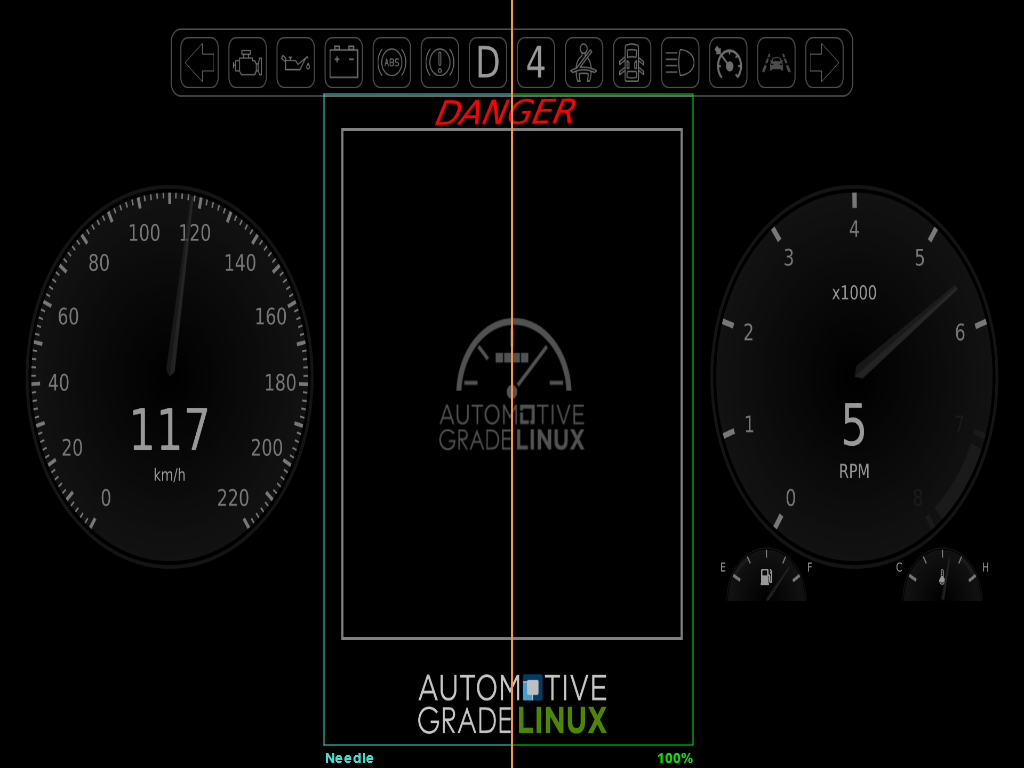
In the OpenQA tool, the orange divider in the presented screenshot can be moved left and right with the cursor. This makes it easy to identify differences between reference and recent execution. The greenish frame shows the region of interest which is checked for content. The 100% shows the fit ratio.
Additionally, during the test execution a screen recording is performed and further logs such as those from serial terminal are provided.
With this option, a fully automated flow from source repository to generated and tested image is achieved. It is possible that working group members can fork the existing meta-elisa repository on GitHub, do modifications, check that it is built properly using GitLab and that the image remains functionally by checking the OpenQA result. This flow would be completely web based without the demand of even having a development environment setup locally on a PC.
However, this may more be used as an exceptional case. The interaction with the system to understand and learn is rather limited in this scenario. As an intention is to develop the system further and gain a larger understanding of the demand of a safety-critical system with Linux based workloads, there are many more entry points for different levels of expertise and personal interest.
The different entry points to experience the automotive use case
In order to make it easier for new contributors to join the ELISA Automotive WG, the demo has multiple entry points.
- Natively on a development PC using the Readme within meta-elisa
- Starting from a docker file on a development PC
- Using a docker image based on the ELISA provided docker file
- Enhance the build time by using the yocto SSTATE
- Download QEMU based build images
Closing the loop to the motivation, the aforementioned entry points fulfill the demands of a collaborative project, where people of different interests come together to collaborate. It is possible to understand the system creation from scratch with an own build from source, or just trace a workload by using the pre-built QEMU images. The development flow is accelerated by providing docker images and cached build artifacts. As the outputs of different pipeline steps are available, debugging gets simplified as well (like checking a native build against a docker build or behavior of the own vs. generated QEMU image).
In summary, a comprehensive documentation (including this post) helps to tailor the pipeline and images to individual demands. Though, to have the best compatibility for exchange with others, the usage of a docker container is recommended.
Docker container for better compatibility of CI and manual reproduction
Taking into account the large number of different host machines and Linux distributions that exist, from practical experience the ELISA CI is providing a docker file as a common base for development. The docker file is used to generate the docker image, which again is used to build the meta-elisa. By providing the docker file and docker image also to others, who want to create a local build on their machine, influence of the underlying Linux distribution is reduced. Documentation about the docker container creation and usage can be found in the wg-automotive github repository. To pull the docker container directly use:
docker pull registry.gitlab.com/elisa-tech/docker-image/elisa
Some general remarks regarding container should be mentioned for competition:
- There is still a (limited) dependency to the underlying OS outside the container, as the docker image uses for example the Linux kernel from the host system. However, side effects of missing environment setups, conflicting or overwriting packages are minimized by using the docker container.
- Regarding build time and performance the impact of the container could be neglected. The duration and system load during the build with and without container usage was very similar.
The docker file will be kept up to date to reflect demands as per meta-elisa or dependency from yocto or AGL updates. This makes sure to always have the latest features and improvements also for the planned next steps reflected for better reproduction of results.
Outlook and next steps
As an evolution of the use case, activities have been started to enable a reference image of an example architecture including Xen and Zephyr on real automotive hardware. Any result from the automotive as well as other working groups within ELISA should feed into the example architecture tailorable to specific use case demands.
Additionally having a proper software bill of material (SBOM) generation will also enhance the quality of the reproducible demo. It will support upcoming regulations which require an understanding of the content of your software product. As AGL also works on the reproducible build to generate binary compatibility of builds this may be an additional enhancement considered as future activity.
Summary
- ✔ By setting up the CI with QEMU image deployment to the openQA testing it is possible to quickly track changes and validate code changes for proper appliance along the chain from source to deployment.
- ✔ Active contributors in ELISA have the chance to check their own commits or pull requests by using a standardized GitHub development flow and start the CI by a two line change in the pipeline reference to the meta-elisa fork and branch commit.
- ✔ The different entry points and precompiled build results enable interested people to decide to build an image from scratch, use a docker container to reduce environment setup steps and reduce build time to a fraction by taking cached build artifacts from the server.
- ✔ By provisioning the final QEMU build image, it is even possible to access and boot the generated image without the need of performing an own build.
As all pipeline elements from documentation to later qa testing are dependent on each other and are coupled to an integrated flow. A high degree of dependability and reproduction is achieved with this solution. With a future enhancement of SBOM generation and utilization of reproducible builds project, the system dependability will further be increased. The automated execution supports that aligned development flows are kept and regressions can be tackled before they occur. Best entry points for reproduction of the results are the meta-elisa and wg-automotive docker container documentation in GitHub.