Safe Systems with Linux (Video)
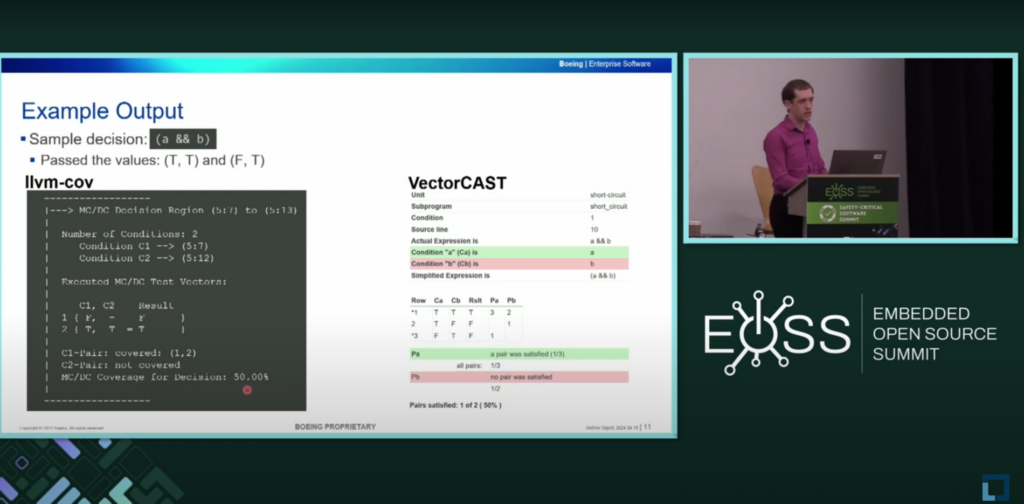
As Linux is increasingly deployed in systems with varying criticality constraints, distro providers are expected to ensure that security fixes in their offerings do not introduce regressions for customer products...

As Linux is increasingly deployed in systems with varying criticality constraints, distro providers are expected to ensure that security fixes in their offerings do not introduce regressions for customer products...
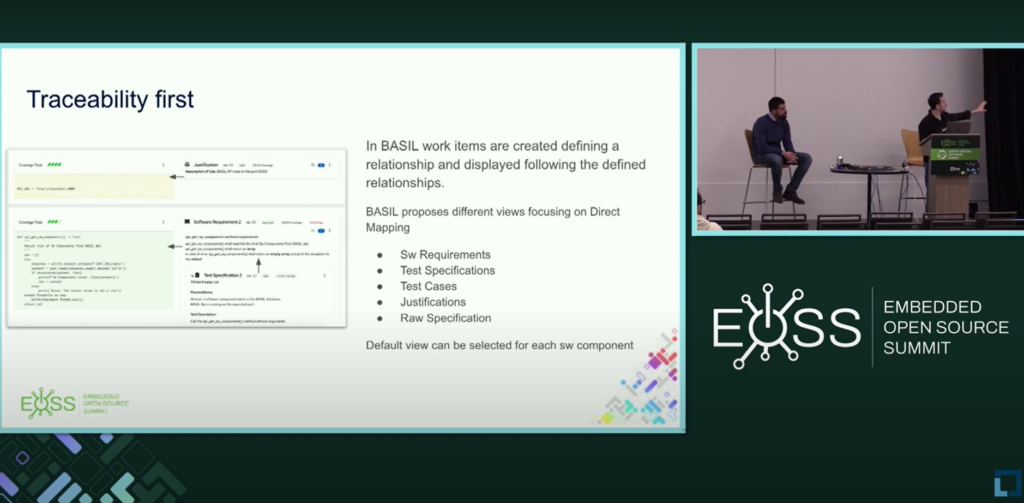
Creating and maintaining a safety critical project comes with a lot of challenges. A central issue is keeping your documentation, starting from planning and guideline documents, down to requirements, safety...
The ELISA Project is hosting its next workshop on December 10-12 at the NASA Goddard Space Flight Center in Greenbelt, Maryland. This event, which is free to attend and open...
Last month, the ELISA Project members had the exciting opportunity to attend and speak at both the Open Source Summit Europe and the Linux Plumbers Convention. During these events, we...
The Embedded Open Source Summit (EOSS) serves as a pivotal event for the open source embedded projects and developer communities. This umbrella event brings together various micro conferences, including the...
KernelCI started 10 years ago as a small project to test the kernel on Arm devices. The project grew over the years and today a new architecture is in place....
The Embedded Open Source Summit (EOSS) serves as a pivotal event for the open source embedded projects and developer communities. This umbrella event brings together various micro conferences, including the...
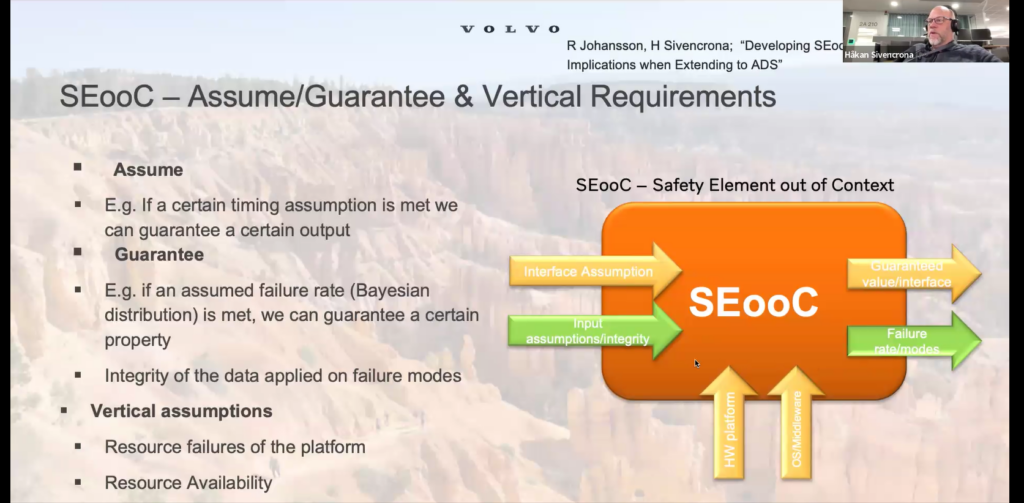
For quite a few years, ISO 26262 has supported a component/element-based approach to ISO 26262, SEooC or Safety Element out of Context. This has simplified the argumentation and integration for...
One of the major disadvantages of git’s blame command is that the minimum unit of change it tracks is the line of text. As past of the ELISA Seminar series,...
Embedded Open Source Summit (EOSS) is an umbrella event for open source embedded projects and developer communities to come together under one roof for important collaboration, discussions and education. The event...